# NumPy
import numpy as np
X = np.array([[1200], [1400], [1600]])
y = np.array([[250000], [275000], [300000]])
print("X =", X)
print("y = ", y)X = [[1200]
[1400]
[1600]]
y = [[250000]
[275000]
[300000]]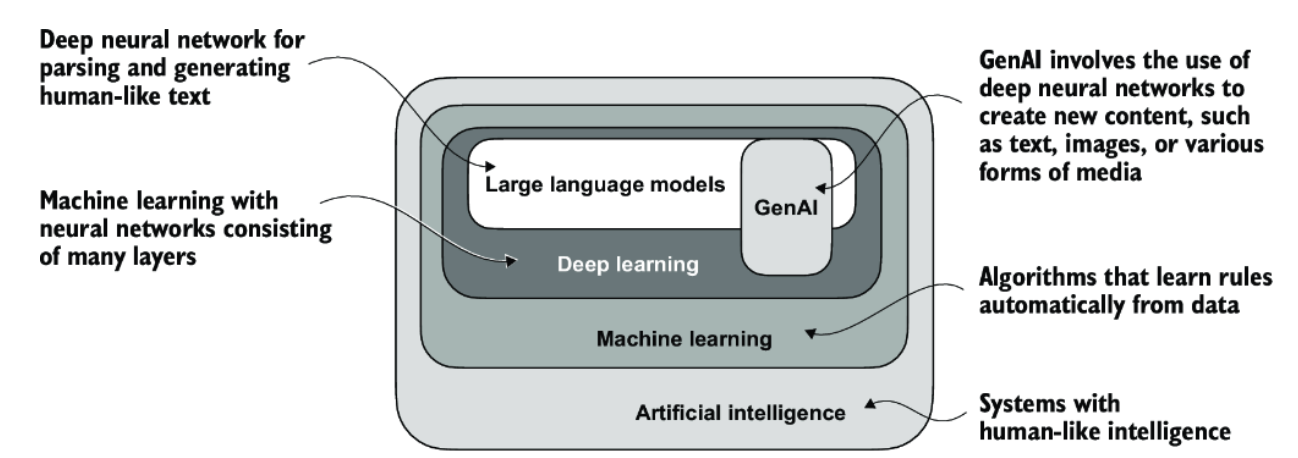
Machine learning is about enabling computers to recognize patterns in data so they can make accurate predictions or decisions without being explicitly programmed for every scenario. At its core, it involves feeding a model real-world examples encoded in a dataset and allowing the computer to learn the relationship between inputs and outputs. Once trained, the model can apply that learned relationship to make predictions on new, unseen data.
To build a machine learning model, we need four key ingredients:
“Linear” in this context means that the effect of \(x\) on \(\hat{y}\) is proportional and constant: no matter what value of \(x\) we choose, an increase of 1 unit in \(x\) always increases \(\hat{y}\) by exactly \(w_1\) units. This property makes the model highly interpretable.
There are many business use cases for machine learning, a few of which are listed below. We’ll start with the simplest possible machine learning model: simple linear regression. It’s a powerful tool that helps us understand the core ideas behind more complex models, including the ones that power today’s cutting-edge AI systems like ChatGPT and several of the examples in the table below.
| Use Case | Sample Inputs | What does the model output? | What Business Question is Being Answered? |
|---|---|---|---|
| Price Prediction | Property size, location, features | Numeric price estimate | How should I price products to stay competitive and profitable? |
| Demand Forecasting | Historical sales, promotions, holidays | Predicted sales volume | How can I manage inventory or staffing to meet demand? |
| Credit Risk Scoring | Income, credit history, employment data | Risk category (e.g., low/medium/high) | Should I approve this loan, and at what interest rate? |
| Email Spam Detection | Email content, sender info, subject line | Binary label: spam or not spam | How can I prevent unwanted emails from reaching users’ inboxes? |
| Sentiment Analysis | Review text, social media posts | Sentiment label (positive/negative) | What is the public opinion about my product or brand? |
| Disease Diagnosis | Symptoms, test results, demographics | Disease class (e.g., flu, COVID, none) | How can I assist doctors in making accurate and timely diagnoses? |
| Energy Usage Estimation | Time of day, weather, appliance usage | Predicted energy consumption | How should I manage power supply or optimize grid efficiency? |
A simple linear regression model takes a single input variable \(x\) and predicts the value of a corresponding output variable \(y\). For example, the input variable might represent a house’s square footage, and the output variable could represent the value of the home.
We can write down the relationship between square footage and value in the form of a mathematical equation (also called a mathematical function or a model):
\[ y = w_0 + w_1 x \]
Where \(y\) represents the home value and \(x\) represents the square footage.
In machine learning jargon \(w_0\) and \(w_1\) are called the parameters or weights of the model (hence the use of \(w\) in the notation) and describe the nature of the relationship between \(x\) and \(y\). \(w_0\) and \(w_1\) are the numbers that the computer will learn (i.e. derive) based on what is observed in real life which will be encoded into training data discussed in the next section.
In other fields such as econometrics the weights (also called coefficients) might be introduced using the Greek alphabet notation of \(\alpha\) and \(\beta\).
Simple linear regression might bring to mind the equation of a line in slope-intercept which is often presented as:
\[ y = mx + b \]
where \(x\) and \(y\) are numbers in the coordinate plane with \(m\) representing the slope of the line and \(b\) representing the y-intercept (the point where the line crosses the y-axis) as shown in the image below:
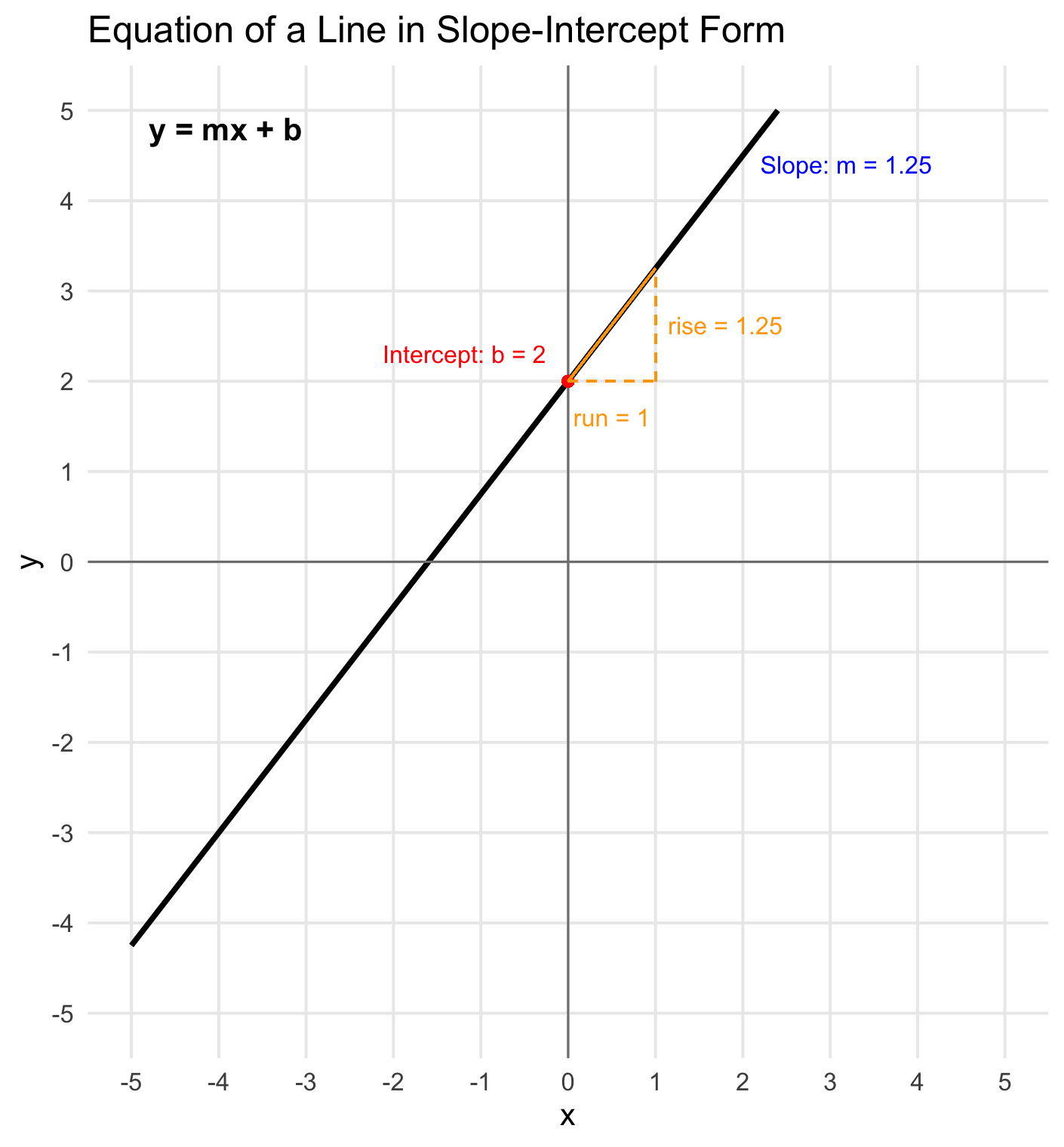
Simple linear regression and the equation of a line are in fact the same mathematical equation. In the context of linear regression, we simply use different notation: \(w_1 = m\) (the slope), and \(w_0 = b\) (the y-intercept which in machine learning is referred to as the bias term).
It’s common for different fields of study to use different notation and words for the same mathematical concepts. Unfortunately this can be one of the biggest sources of confusion for students so we will make an effort to call out these differences throughout the course.
Now that we’ve shown that simple linear regression is actually just the equation of a line where \(w_0\) is the y-intercept and \(w_1\) is the slope we can have a visual picture in mind for how an input variable \(x\) and the output variable \(y\) are related.
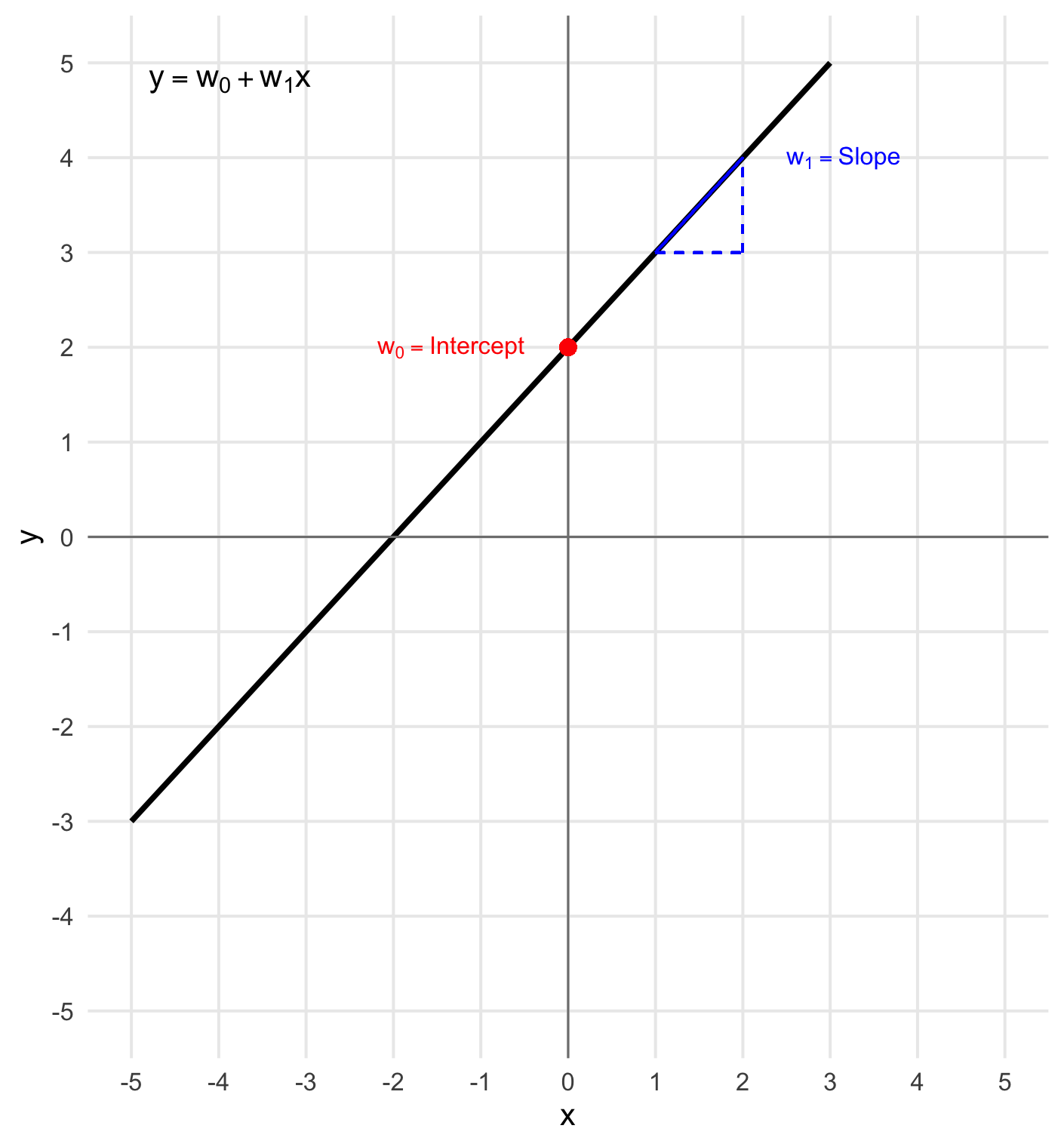
Think about our home value example, where we’re predicting a house’s price based on its square footage.
What does your intuition tell you about the values \(w_0\) and \(w_1\) are likely to take on once they are estimated?
Do you expect them to be positive or negative numbers?
Assume \(x\) was \(0\), what would the equation be telling you?
As soon as we come up with values for \(w_0\) and \(w_1\) have a way predicting values of \(y\) when plugging in any value of \(x\) to the fitted equation.
The goal of machine learning is to learn the best possible values \(w_0\) and \(w_1\) allowing us to make good predictions of a homes value based on it’s square footage. We will soon explore how the computer learns these weight values but to build our intuiton on what the model does we can start by simply guessing values for the weights. For example, let’s assume:
\[ w_0 = 50,\!000 \quad \text{and} \quad w_1 = 200 \]
Then our function becomes:
\[ \hat{y} = 50,\!000 + 200x \]
We use the notation \(\hat{y}\) (read as “y-hat”) here to emphasize that this is a now predicted value based on the model, not an observed or actual value.
This act of using the trained model to compute a prediction based on an input \(x\) is also called inference since we are inferring an estimated output \(\hat{y}\).
Using this model we can predict that a home with 3,000 square feet will have a value of:
\[ \hat{y} = 50,\!000 + 200 \cdot 3,\!000 = \$650,\!000 \]
Now, consider what the model predicts for a home with 0 square feet:
\[ \hat{y} = 50,\!000 + 200 \cdot 0 = \$50,\!000 \]
This implies that the base value of the property—the land alone, with no house—might be interpreted as $50,000. This is exactly why both \(w_0\) and \(w_1\) are necessary. If we had included only \(w_1 x\) and omitted \(w_0\), the model would always predict 0 for an input of \(x = 0\), which might not reflect the reality (e.g., land still has value).
In machine learning, the term bias is used to refer to this \(w_0\) value. The name comes from the fact that it shifts (or “biases”) the entire output of the model up or down, independent of the input. Geometrically, it determines the \(y\)-intercept of the prediction line. It allows the model to better fit real-world data.
Choosing a different set of weight values would result in a different equation, resulting in a different prediction. For example, assume instead that \(w_0 = 25,000\) and \(w_1 = 300\) resulting in the following equation:
\[ \hat{y} = 25,000 + 300 x \]
This model would predict that the same 3,000 square-foot home has a much higher value of \(\$925,000 = 25,000+300*3,000\).
Let’s assume the $3,000 square foot home we have in mind recently sold for $800,000 reflecting it’s true value (a single instance of \(y\)). We could then compute the error associated with each set of model weights as the absolute value of the prediction error as follows:
Given these results we might reasonably conclude that the second set of model weights produced the better prediction, since it was less wrong by $25,000.
In machine learning this prediction error is commonly called the model’s loss, that is, how far off the prediction is from the observed truth. The mathematical function by which we compute prediction error is called the loss function. In our case, we could represent our choice of loss function as \(\left| \hat{y} - y \right|\).
There are many possible choices of loss function. For example, we didn’t have to use absolute value, we could have simply taken the difference as our measurement of loss. We will discuss loss functions and introduce the most commonly used loss functions in later sections.
In order for a computer to learn the best weight values for a model, we need to communicate with it in the language it understands: data. In this context, “data” refers to numerical values organized in rows and columns, like a spreadsheet or matrix. Each row is a single example, and each column holds a particular feature or label.
For our home value prediction example, imagine a simple dataset with two columns:
Each row contains both the square footage and the corresponding value for a particular house. Together, each pair of values forms what we call an input-output pair. A complete set of these pairs is called a dataset.
We can write this dataset using the following compact mathematical notation:
\[ \{(x^{(i)}, y^{(i)})\}_{i=1}^n \]
This might look intimidating at first, but it’s just a convenient way of saying:
“We have \(n\) examples. For each example \(i\), we observe an input \(x^{(i)}\) and a corresponding output \(y^{(i)}\).”
Let’s break down the notation a bit further:
If you wrote this out as a table, it might look like this:
| Example (\(i\)) | \(x^{(i)}\) = Square Footage | \(y^{(i)}\) = Home Value |
|---|---|---|
| 1 | 1200 | 250,000 |
| 2 | 1400 | 275,000 |
| 3 | 1600 | 300,000 |
| … | … | … |
| \(n\) | (last example) |
This is the kind of data we use to “train” a machine learning model, by showing it many examples, we give it a chance to learn the relationship between inputs and outputs.
In different fields and contexts, we often use different terms for the same underlying ideas. Here’s a helpful reference for the various names used for inputs and outputs in machine learning and related areas:
| Concept | Common Synonyms | Notes |
|---|---|---|
| Input | Feature, Independent Variable, Predictor, Covariate, Regressor, \(x\) | The value(s) we feed into the model to make a prediction. Can be one variable or many. |
| Output | Label, Target, Dependent Variable, Response, \(y\) | The value the model is trying to predict or learn from. |
| Input-Output Pair | Example, Observation, Data Point, \((x^{(i)}, y^{(i)})\) | A single row of data showing both the input and the correct output. |
| Collection of Examples | Dataset, Training Data, Sample | All the input-output pairs we give to the model to learn from. |
| Predicted Output | Prediction, Estimate, \(\hat{y}\) | The output the model thinks is correct, based on what it learned. |
There are actually four equivalent ways of representing a dataset, each useful in different contexts. You will be greatly aided in your study of machine learning if you can recognize and switch between all four forms with ease. Different textbooks, courses, tutorials and code libraries will use different representations so developing fluency in all of them will help you understand ideas more deeply and communicate more clearly.
This is the notation we just introduced:
\[ \{(x^{(i)}, y^{(i)})\}_{i=1}^n \]
It represents the dataset as a collection of \(n\) input-output pairs, where each \(x^{(i)}\) is an input and each \(y^{(i)}\) is the corresponding output. This form is widely used in textbooks and research papers because of its compactness and precision. It’s the language of mathematics, and it’s especially helpful when trying to understand what’s happening under the hood as computer code executes. By using this notation, we can reason more clearly about how models learn and make predictions.
This is the most familiar form for most people and is often used in business and statistics. Each row represents an example; each column represents a variable or feature.
| Example (\(i\)) | \(x^{(i)}\) = Input (e.g., SqFt) | \(y^{(i)}\) = Output (e.g., Price) |
|---|---|---|
| 1 | 1200 | 250,000 |
| 2 | 1400 | 275,000 |
| 3 | 1600 | 300,000 |
| … | … | … |
| \(n\) | — | — |
This is also the format used in tools like Excel, Google Sheets, or data frames in Python and R.
Matrix notation is a compact and powerful way to represent datasets and linear regression models. It helps us generalize models to many inputs and use efficient numerical libraries for computation.
In matrix form, a simple linear regression with one input variable looks like this:
\[ \hat{y} = \begin{bmatrix} 1 & x \end{bmatrix} \begin{bmatrix} w_0 \\ w_1 \end{bmatrix} = w_0 + w_1 x. \]
Here:
While this may initially feel like a notational trick, it is a standard approach in regression modeling and is essential for applying matrix operations efficiently.
This notation extends naturally to represent the entire training dataset. When including an intercept, we create an input matrix (also called a design matrix) by adding a column of ones on the left:
\[ \mathbf{X} = \begin{bmatrix} 1 & x^{(1)} \\ 1 & x^{(2)} \\ \vdots & \vdots \\ 1 & x^{(n)} \end{bmatrix}, \] More generally:
If we have more than one input feature (for example, square footage and number of bedrooms, etc), \(\mathbf{X}\) becomes:
\[ \begin{bmatrix} 1 & x_1^{(1)} & x_2^{(1)} & \cdots & x_d^{(1)} \\ 1 & x_1^{(2)} & x_2^{(2)} & \cdots & x_d^{(2)} \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 1 & x_1^{(n)} & x_2^{(n)} & \cdots & x_d^{(n)} \end{bmatrix} \]
The output vector \(\hat{\mathbf{y}}\) stores the predicted values (e.g., house prices):
\[ y = \begin{bmatrix} y^{(1)} \\ y^{(2)} \\ \vdots \\ y^{(n)} \end{bmatrix} \]
The weight vector \(\mathbf{w}\) stores the weight parameters:
\[ \mathbf{w} = \begin{bmatrix} w_0 \\ w_1 \\ \vdots \\ w_{d} \end{bmatrix} \] This leads to the compact matrix equation for all predictions:
\[ \hat{\mathbf{y}} = \mathbf{X} \mathbf{w} = \begin{bmatrix} 1 & x_1^{(1)} & x_2^{(1)} & \cdots & x_d^{(1)} \\ 1 & x_1^{(2)} & x_2^{(2)} & \cdots & x_d^{(2)} \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 1 & x_1^{(n)} & x_2^{(n)} & \cdots & x_d^{(n)} \end{bmatrix} \begin{bmatrix} w_0 \\ w_1 \\ w_2 \\ \vdots \\ w_d \end{bmatrix} \] > Matrix notation helps us express models clearly and allows computers to compute predictions for all examples at once. This approach is essential when scaling to many features and large datasets. We will rely on this notation throughout the course.
Code Representation (Arrays or Tensors):
When implementing models in code, we typically use arrays (Python’s NumPy package) or tensors (Python’s PyTorch package) which are data structures that store values in memory for numerical computation.
Below is an example with NumPy
# NumPy
import numpy as np
X = np.array([[1200], [1400], [1600]])
y = np.array([[250000], [275000], [300000]])
print("X =", X)
print("y = ", y)X = [[1200]
[1400]
[1600]]
y = [[250000]
[275000]
[300000]]So what does this mean?
X is a matrix of inputs (in this case, just one feature: square footage).y is a vector of outputs (the target values, like home prices).y matches the corresponding row in X.Let’s now connect this code back to the set and matrix representations of a dataset.
Equivalence with Set Notation
In set notation this tiny dataset could be represented as three input-output pairs:
\[ \{(x^{(i)}, y^{(i)})\}_{i=1}^3 \] More specifically:
Each pair \((x^{(i)}, y^{(i)})\) is represented by a row in X and the corresponding row in y.
Equivalence with Matrix Notation
We can also see how this toy dataset would be written in matrix notation as a pair of matrices, one for the inputs and one for the outputs:
\[ X = \begin{bmatrix} x_1^{(1)} \\ x_1^{(2)} \\ x_1^{(3)} \end{bmatrix} = \begin{bmatrix} 1200 \\ 1400 \\ 1600 \end{bmatrix}, \quad y = \begin{bmatrix} y^{(1)} \\ y^{(2)} \\ y^{(3)} \end{bmatrix} = \begin{bmatrix} 250{,}000 \\ 275{,}000 \\ 300{,}000 \end{bmatrix} \]
PyTorch Example
Lastly, below we represent the same toy dataset using PyTorch, currently the most popular deep learning library, and the one used to develop many modern large language models (LLMs).
PyTorch uses a data structure called a tensor.
A tensor is a generalization of familiar objects like scalars, vectors, and matrices:
5)[1200, 1400, 1600])Increasing the tensor dimension allows us to compactly describe multiple sets of structured data and for a computer to perform parallel computations efficiently which is essential when training modern LLMs.
In theory, there is no limit on the number of dimensions a tensor can have.
In practice, we won’t need more than 4D tensors to build modern large language models (LLMs).
For simple models like linear regression, a 2D tensor (i.e., a matrix) is sufficient to represent the data.
Below we illustrate the same toy data set using a PyTorch tensor.
import torch
# Input data: square footage (in one column)
X = torch.tensor([[1200.], [1400.], [1600.]])
# Output data: home prices
y = torch.tensor([[250000.], [275000.], [300000.]])
print("X (inputs):")
print(X)
print("\ny (outputs):")
print(y)X (inputs):
tensor([[1200.],
[1400.],
[1600.]])
y (outputs):
tensor([[250000.],
[275000.],
[300000.]])The dot (.) at the end of the numbers (like 1200. or 250000.) indicates that the numbers are being treated as floating point numbers (i.e., float type) rather than integers. A floating point number is a number that can represent decimal values on a computer, in contrast to an integer, which can only represent whole numbers. PyTorch models expect inputs and outputs to be floating point numbers because most model operations involve decimals.
We will soon use a set of training Data to help learn model parameters but before doing so we need to introduce the remaining two ingredients for machine learning: loss functions and training algorithms.
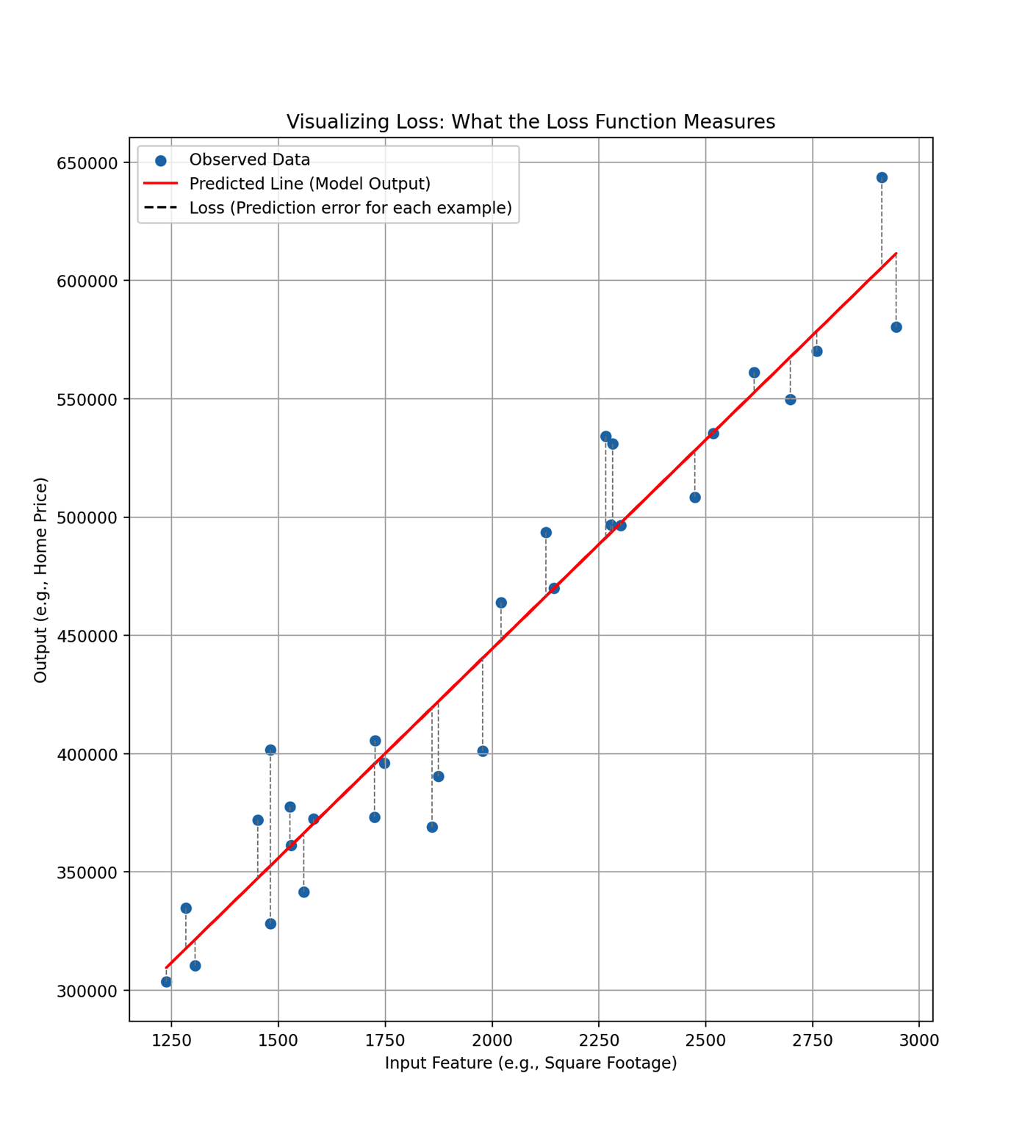
A loss function is separate mathematical equation whose purpose it to quantify the error between a model’s predictions \(\hat{y}^{(i)}\) and the true output values observed in the training data \(y^{(i)}\). When discussing mathematical model structure (i.e. simple linear regression), we briefly introduced the notion of a loss function and used the absolute value of the difference between \(\hat{y}^{(i)}\) and between and \(y^{(i)}\) to measure prediction error (i.e. loss): \(\left| \hat{y} - y \right|\). Note that this loss is calculated for each individual training example. That is, if we had 100 training examples (i.e. rows of data) containing the square footage and home value for 100 homes, we could compute the loss for each of these examples. The dotted lines in the plot below help you visualize the loss for each example in a set of training data.
We could then find the average loss by summing up the observation level loss and dividing by the number of observations to get what is commonly called Mean Absolute Error (MAE), written as:
\[ \frac{1}{n} \sum_{i=1}^{n} \left| \hat{y}^{(i)} - y^{(i)} \right| \]
MAE is an intuitive choice for a loss function, but not the only choice. There are other equations that will measure prediction error in slightly different ways. One such equation and the most commonly used loss function when learning parameters for a simple linear regression is called Mean Squared Error (MSE), written as:
\[ \frac{1}{n} \sum_{i=1}^{n} \left( \hat{y}^{(i)} - y^{(i)} \right)^2 \]
Recall that \(\hat{y} = w_0 + w_1 x\) hence we can plug \(w_0 + w_1 x\) into the equation for \(\hat{y}\) to make clear that the loss function, which we denote as \(\mathcal{L}\) (a stylized version of the capital Latin letter L), is a function of two variables: \(w_0\) and \(w_1\). This means that different values of \(w_0\) or \(w_1\) or both will yield different loss values. The goal of machine learning is to find (i.e. learn) the values of \(w_0\) and \(w_1\) that will make this loss function (i.e., total prediction error) as small as possible.
\[ \mathcal{L}(w_0, w_1) = \frac{1}{n} \sum_{i=1}^n (\hat{y}^{(i)} - y^{(i)})^2 = \frac{1}{n} \sum_{i=1}^n (w_0 + w_1 x^{(i)} - y^{(i)})^2 \]
In the next section, we will introduce a training algorithm called gradient descent. This algorithm systematically searches through different combinations of values for \(w_0\) and \(w_1\) to find those that minimize the loss or in other words, to learn the best-fitting line.
To really understand how gradient descent works, we first need to deepen our understanding of the loss function, specifically how it behaves with respect to the parameters \(w_0\) and \(w_1\).
Recall that in simple linear regression, we model predictions as:
\[ \hat{y} = w_0 + w_1 x \]
When we think of this as a function of the input variable \(x\), we can plot it as a straight line on a 2D coordinate system (with \(x\) on the horizontal axis and \(\hat{y}\) on the vertical axis) as we did earlier.
But now, let’s flip our perspective. In the previous section, we learned that training data consists of actual examples, pairs of \(x\) and \(y\), from the real world. So once we have a training dataset, \(x\) and \(y\) are known. That means we no longer need to treat \(x\) as a variable in our model equation.
In this case, the prediction formula:
\[ \hat{y} = w_0 + w_1 x \]
becomes a function where \(w_0\) and \(w_1\) are the unknown variables. Our goal is to adjust these weights to reduce the difference between our predicted values \(\hat{y}\) and the actual outcomes \(y\). So during model training, we treat \(w_0\) and \(w_1\) as the variables to solve for, which turns our loss function into a function of two variables, \(w_0\) and \(w_1\):
\[ \mathcal{L}(w_0, w_1) = \frac{1}{n} \sum_{i=1}^n (\hat{y}^{(i)} - y^{(i)})^2 = \frac{1}{n} \sum_{i=1}^n (w_0 + w_1 x^{(i)} - y^{(i)})^2 \] Don’t be intimidated by the notation. Once we have a training dataset, all the \(x^{(i)}\) and \(y^{(i)}\) values are known values. The only unknowns we are solving for are \(w_0\) and \(w_1\).
This is called the Mean Squared Error (MSE) loss function, and it helps us measure how good or bad our model’s predictions are.
The big curly \(\mathcal{L}\) is a stylized version of the capital Latin letter L. In this context, \(\mathcal{L}\) stands for “Loss” or sometimes “Loss function.”
This function tells us how well our model is performing overall. A smaller value means our predictions on average are close to the true values, and a larger value means on average we’re making bigger mistakes.
Our goal is to find the values of \(w_0\) and \(w_1\) that make this loss function as small as possible.
Because the loss depends on both \(w_0\) and \(w_1\), we need three dimensions to visualize and plot this function:
As the saying goes, a picture is worth a thousand words, so let’s visualize what this looks like.
In the plot below, we graph the loss function \(\mathcal{L}(w_0, w_1)\) to see it as a 3D surface, with \(w_0\) on the x-axis, \(w_1\) on the y-axis, and the height of the surface representing the mean squared error loss \(\mathcal{L}\). This gives us a landscape of possible values of \(w_0\) and \(w_1\) to choose from.
The plot also includes contour lines, which are like the topographical lines you see on a map. These contours help you visualize the height of the surface even when looking down from above onto the flat 2D plane. The contour lines will be especially helpful in the next section when we explore how adjusting the weights changes the loss value.
MSE Loss Surface with Contours
As can be seen from the plot, there are many possible choices of \(w_0\) and \(w_1\), each resulting in a different loss value. In the next section, we will study a foundational algorithm called gradient descent which is designed to intelligently and iteratively explore different combinations of \(w_0\) and \(w_1\), calculating the loss that results from each combination. The process continues until convergence occurs, that is, until the algorithm believes it has found the best choice of weights that minimize the loss. We’ll explore the details of how gradient descent works in the next section.
Which choice of weight values is better: point A or point B? Why?
MSE is the most commonly used loss function for regression problems because it has several useful properties:
These properties make MSE both practical and theoretically sound for training models to make accurate predictions.
Once we’ve selected a loss function, the next challenge is figuring out how to minimize it, that is, how to find the values of \(w_0\) and \(w_1\) that make the loss as small as possible.
To build intuition, imagine you’re standing somewhere on the inside of a smooth, canyon-shaped surface like the 3D plot shown in the last section. This surface represents the loss function, and your location corresponds to a specific pair of weights: \((w_0, w_1)\). Your goal is to hike down to the very bottom of the canyon, the point where the loss is lowest and your model makes its best predictions.
But how do you know which way to step?
This is where the training algorithm called gradient descent comes in. It uses the concept of a derivative (a rate of change from calculus) to calculate the slope of the loss surface at your current position. Then it suggests a small step in the direction that will reduce the loss the fastest: the steepest descent.
It’s called an algorithm because it repeats this process: take a step, recalculate the slope, take another step while gradually working its way toward the minimum.
In this way, gradient descent acts like a smart compass that always points you downhill in the direction that leads most quickly to better predictions.
That explains what descent means in gradient descent, but what about gradient?
Gradient is just a fancy word for the direction of steepest ascent (what we’d call the slope in single variable calculus). Since we want to go downhill, toward lower loss, we will actually move in the opposite (i.e. negative) direction of the gradient, hence the name gradient descent.
Since we are working with a loss function of two variables (the weights), \(\mathcal{L}(w_0, w_1)\), there are two directions in play for each step we take down the hill. In this case, the gradient is a vector with two components, each representing the rate of change of the loss with respect to one of the weights (you can think of each component as the “slope” in a particular direction). Mathematically, these components are written as:
\(\frac{\partial \mathcal{L}}{\partial w_0}\): how the loss changes when we adjust \(w_0\) \(\frac{\partial \mathcal{L}}{\partial w_1}\): how the loss changes when we adjust \(w_1\)
Together, these two components form the gradient vector of the loss function.
This is written using the nabla symbol \(\nabla\) (pronounced “nabla”, named after an ancient harp), which represents the gradient operator:
\[ \nabla \mathcal{L}(w_0, w_1) = \begin{bmatrix} \frac{\partial \mathcal{L}}{\partial w_0} \\ \frac{\partial \mathcal{L}}{\partial w_1} \end{bmatrix} \]
The notation looks intimidating, but let’s break it down symbol by symbol:
Just like other more familiar mathematical operators, such as addition \(+\) and multiplication \(\times\), the \(\nabla\) operator means we will perform some operation on whatever equation or numbers we are applying to. In our case, we are taking the partial derivatives of the loss function with respect to each weight in order to obtain the gradient vector. Below, we will show how the partial derivitives of the loss function using rules from calculus.
A derivative is a way of measuring how fast something is changing.
In simple terms, the derivative tells you the slope of a function at a specific point—that is, how steep the function is at that spot.
Imagine this:
You’re walking up a hill, and you want to know how steep it is right where you’re standing. That steepness, the instantaneous slope, is the derivative.
Mathematically:
If \(f(x) = x^2\), then the derivative is:
\[ \frac{df}{dx} = 2x \]
At \(x = 3\), the slope is \(2 \cdot 3 = 6\), so the curve is rising steeply.
In gradient descent, we’re just following the steepest slope as we hike downhill toward the lowest point.
A partial derivative is just the derivative of a multivariable function with respect to one variable at a time, while holding all the other variables constant.
Think of it like asking:
> “If I only adjust this one knob (say, \(w_0\)), how does the output change, assuming all other knobs stay fixed?”
Example:
Suppose we have this function with two variables:
\[ f(w_0, w_1) = w_0^2 + 3w_0 w_1 + w_1^2 \]
We can take the partial derivatives:
With respect to \(w_0\): \[ \frac{\partial f}{\partial w_0} = 2w_0 + 3w_1 \]
With respect to \(w_1\):
\[ \frac{\partial f}{\partial w_1} = 3w_0 + 2w_1 \]
Each tells us how the function changes in that direction, treating the other variable like a constant.
This is essential for gradient descent: we compute the slope in each direction (each weight), then use those partials to form the gradient vector.
Recall that our mean squared error (MSE) loss function is:
\[ \mathcal{L}(w_0, w_1) = \frac{1}{n} \sum_{i=1}^n (\hat{y}^{(i)} - y^{(i)})^2 = \frac{1}{n} \sum_{i=1}^n (w_0 + w_1 x^{(i)} - y^{(i)})^2 \] To take the partial derivatives we apply the chain rule which gives us:
The chain rule is a way to take the derivative of a function inside another function.
Think of it like peeling an onion: you take the derivative of the outer layer, then multiply it by the derivative of the inner layer.
Example:
Suppose you have:
\[ f(x) = (3x + 1)^2 \]
This is a composition of two functions:
Using the chain rule:
\[ \frac{df}{dx} = \frac{d}{du}(u^2) \cdot \frac{du}{dx} = 2u \cdot 3 = 2(3x + 1) \cdot 3 = 6(3x + 1) \]
So even though the original function looks complicated, we can compute the derivative one layer at a time and then multiply the results from each layer.
This same principle is applied to find the partial derivatives of a loss function like MSE.
Partial Derivative with respect to \(w_0\)
\[ \frac{\partial \mathcal{L}}{\partial w_0} = \frac{2}{n} \sum_{i=1}^n (w_0 + w_1 x^{(i)} - y^{(i)}) \times 1 = \frac{2}{n} \sum_{i=1}^n (w_0 + w_1 x^{(i)} - y^{(i)}) \]
Partial Derivative with respect to \(w_1\)
\[ \frac{\partial \mathcal{L}}{\partial w_1} = \frac{2}{n} \sum_{i=1}^n (w_0 + w_1 x^{(i)} - y^{(i)}) \times x^{(i)} \]
Putting the two partial derivtives into a vector gives us the gradient of the loss function:
\[ \nabla \mathcal{L}(w_0, w_1) = \begin{bmatrix} \frac{\partial \mathcal{L}}{\partial w_0} \\ \frac{\partial \mathcal{L}}{\partial w_1} \end{bmatrix} = \frac{2}{n} \sum_{i=1}^n \begin{bmatrix} w_0 + w_1 x^{(i)} - y^{(i)} \\ (w_0 + w_1 x^{(i)} - y^{(i)}) \cdot x^{(i)} \end{bmatrix} \] Don’t lose sight of the fact that this apparently complex notation just represents simple numbers in the end.
For example, let’s assume our training data was:
With initial weights of: \(w_0 = 1, \; w_1 = 1\)
Then, substituting all these values into the gradient equation above we get:
\[ \begin{align*} &= \frac{2}{4} \Bigg( \begin{bmatrix} 1 + 1 \cdot 0 - 1 \\ (1 + 1 \cdot 0 - 1) \cdot 0 \end{bmatrix} + \begin{bmatrix} 1 + 1 \cdot 1 - 3 \\ (1 + 1 \cdot 1 - 3) \cdot 1 \end{bmatrix} + \begin{bmatrix} 1 + 1 \cdot 2 - 5 \\ (1 + 1 \cdot 2 - 5) \cdot 2 \end{bmatrix} + \begin{bmatrix} 1 + 1 \cdot 3 - 7 \\ (1 + 1 \cdot 3 - 7) \cdot 3 \end{bmatrix} \Bigg) \\ &= \frac{2}{4} \left( \begin{bmatrix} 0 \\ 0 \end{bmatrix} + \begin{bmatrix} -1 \\ -1 \end{bmatrix} + \begin{bmatrix} -2 \\ -4 \end{bmatrix} + \begin{bmatrix} -3 \\ -9 \end{bmatrix} \right) \\ &= \frac{2}{4} \begin{bmatrix} -6 \\ -14 \end{bmatrix} \\ &= \begin{bmatrix} -3 \\ -7 \end{bmatrix} \end{align*} \]
So the negative gradient of the loss function calculated at:
\[
\begin{bmatrix}w_0 \\ w_1 \end{bmatrix} = \begin{bmatrix} 1 \\ 1 \end{bmatrix}
\]
is:
\[ \nabla \mathcal{L}(w_0, w_1) = \begin{bmatrix} 3 \\ 7 \end{bmatrix} \]
The weight vector and the gradient vector always have the same number of components because the gradient is composed of the partial derivatives with respect to each weight, one for every weight parameter.
Our goal is to use the information enocoded in the gradient vector to update the weight vector and reduce the loss.
We will first explore what this looks like geometrically in order to build our intuition and then we will introduce the mathematical equation that performs this task for us which is the core of the gradient descent algorithm.
The left plot below shows the initial weight vector originating from the origin (point \((0,0)\)), and then shows the gradient descent vector (the negative of the gradient) orginating from the tip of the weight vector since this is the point at which the gradient is calculated. Note that the gradient vector lives in the same 2D space as the weight vector, because it is made up of the partial derivatives with respect to each weight. If the weight vector has two components, the gradient vector will also have two components, one for each direction in the weight space. Visually, the gradient can be drawn as an arrow on the 2D floor, pointing in the direction of steepest ascent.
The left plot also shows the combination of weight values that would result in minimum loss. This is ultimately where we’d like to get to. The dashed line shows the resulting new weight vector when we sum of the existing weight vector with the gradient descent vector. Notice how the gradient descent vector shoots straight through the minimum (i.e the direction of steepest descent), but unfortunately it leaps over it, missing our goal and actually taking us to a place of higher loss. The right plot shows how we address this by introducing a learning rate which is described next.
Because of this risk of overshooting the minimum by taking two large of a step, we introduce a concept called a learning rate that governs the size of the step that we take. The learning rate is a number generally between 0 and 1 that shrinks the magnitude (length) of the gradient descent vector while maintaining its direction. Mathematically, the step size can be written as the product of the learning rate (a scalar) and the gradient vector:
\[ \text{Step size} = \eta \cdot \nabla L(\mathbf{w}) \]
Where:
\[ \mathbf{w} = \begin{bmatrix} w_0 \\ w_1 \end{bmatrix} \] To update the weights, we add the the weight vector to the negative scaled gradient (calculated at the current weights). This is equivalent to subtraction which is generally how you will see the update rule written:
\[ \mathbf{w}_{\text{old}} + (- \eta \cdot \nabla L(\mathbf{w}_{\text{old}})) = \mathbf{w}_{\text{old}} - \eta \cdot \nabla L(\mathbf{w}_{\text{old}}) \]
\[ \mathbf{w}_{\text{new}} \leftarrow \mathbf{w}_{\text{old}} - \eta \cdot \nabla L(\mathbf{w}_{\text{old}}) \]
This equation is the heart of gradient descent. It tells us:
Over multiple iterations, this process gradually guides the weights toward the combination that minimizes the loss function, ideally reaching or approaching the global minimum.
In practice, choosing an appropriate learning rate \(\eta\) is critical:
We can now summarize the gradient desecent algorithm:
Initialize weights
Start with random or zero values for the components of the weight vector \(\mathbf{w}\).
Compute predictions
Use the current weights to compute predictions \(\hat{y}\) for all training examples.
Evaluate the loss
Measure how far off the predictions are from the true values using a loss function \(\mathcal{L}(\mathbf{w})\).
Compute the gradient
Calculate the gradient \(\nabla \mathcal{L}(\mathbf{w})\), which points in the direction of steepest increase in loss.
Update the weights
Move the weights in the opposite direction of the gradient using the update rule:
\[ \mathbf{w}_{\text{new}} \leftarrow \mathbf{w}_{\text{old}} - \eta \cdot \nabla L(\mathbf{w}_{\text{old}}) \]
Repeat
Repeat steps 2–5 until the loss stops decreasing (or decreases very slowly), indicating convergence.
We are now ready to combine all of the ingredients using Python to fit a machine learning model and use it for prediction. You should copy paste the code and run it on your own machine as we go.
The first ingredient is our mathematical model which we’ve already selected as a simple linear regression:
\[ y = w_0 + w_1 x \] The second ingredient is training data. Given the model we have selected, we need a dataset that contains a single output that we want to predict based on a single input. Let’s continue to use the home price predicted by square footage example.
We can get such a data set from Kaggle, a platform for learning and competing in Machine Learning and Data Science.
Kaggle’s House Price Prediction Dataset has 2,000 rows of data with 8 total columns (7 features and 1 target). The table below describes each column in the dataset. For our simple linear regression, we will only need the first column (area) and the last column (price).
| Feature | Description |
|---|---|
| Area | Square footage of the house, which is generally one of the most important predictors of price. |
| Bedrooms & Bathrooms | The number of rooms in a house significantly affects its value. Homes with more rooms tend to be priced higher. |
| Floors | The number of floors in a house could indicate a larger, more luxurious home, potentially raising its price. |
| Year Built | The age of the house can affect its condition and value. Newly built houses are generally more expensive than older ones. |
| Location | Houses in desirable locations such as downtown or urban areas tend to be priced higher than those in suburban or rural areas. |
| Condition | The current condition of the house is critical, as well-maintained houses (in ‘Excellent’ or ‘Good’ condition) will attract higher prices compared to houses in ‘Fair’ or ‘Poor’ condition. |
| Garage | Availability of a garage can increase the price due to added convenience and space. |
| Price | The target variable, representing the sale price of the house, used to train machine learning models to predict house prices based on the other features. |
All steps are implemented below.
import pandas as pd
# 1. Load data
url = "https://raw.githubusercontent.com/byu-strategy/understanding-ai/main/data/house-price-prediction-dataset.csv"
df = pd.read_csv(url)
df.head()
# 2. Features and targets
features = df['Area'].values.reshape(-1,1)
target = df['Price'].valuesSimple Linear Regression
training data
machine learning algorithm
parameters or “weights”
parameters or “weights”
machine learning algorithm
inference
supervised machine learning
Epoch
Supervised Learning: Supervised learning is the most widely used type of machine learning and significantly overlaps with the methodologies of other quantitative fields, such as statistics and econometrics. Supervised learning gets its name from the fact that the input data set has examples of both inputs and outputs. The outputs are called labels, hence you will sometime hear the term “labeled dataset.”
Different disciplines often use different terms for the same concepts. Here’s a helpful guide:
| Concept | Machine Learning | Statistics / Econometrics |
|---|---|---|
| Single data point (e.g., a row in a spreadsheet) | Training example | Observation, Case |
| Input features | Features, Inputs | Independent variables, Regressors, Covariates, Predictors |
| Target output | Label, Target, Output | Dependent variable, Response |
| Collection of data points | Training set, Training data | Sample, Dataset |
| Parameter | Weight (e.g., \(w_1\)) | Coefficient (e.g., \(\beta_1\)) |
| Model prediction | \(\hat{y}\) | Fitted value, Predicted value |
| Loss function | Loss | Objective function, Criterion function |
| Learn model parameters | Training, Fitting | Estimation |
We can directly compute the optimal weights:
\[ \mathbf{w} = (\mathbf{X}^\top \mathbf{X})^{-1} \mathbf{X}^\top \mathbf{y} \]